Основные характеристики радаров
Основные характеристики радаров
Функциональные возможности радиолокатора определяются рядом характеристик, понимание которых позволяет сделать правильный выбор аппарата, в той или иной степени удовлетворяющего потребностям владельца судна. Познакомимся с некоторыми из них.
Дальность действия
Дальность действия радара, указываемая в его паспортных данных – это его важнейший, но далеко не однозначный показатель, и в реальных условиях дальность обнаружения различных целей не всегда будет совпадать с заявленной.
Дальность обнаружения зависит от многих факторов – отражательной способности цели (характеризуемой т.н. ЭПР – эффективной поверхностью рассеяния), ее контрастностью по отношению к фону, высотой антенны и цели, состоянием атмосферы и моря. Поэтому, данная характеристика задается дифференцированно по типам целей и условиям работы радара. В соответствии с требованиями Международной Морской Организации IMO, при нормальных условиях распространения радиоволн, высоте установки антенны РЛС 15 м над уровнем воды и при отсутствии помех от моря, РЛС должна обеспечивать четкую индикацию:
Береговой черты:
– при высоте берега до 60 м на расстоянии до 20 морских миль;
–при высоте берега до 6 м на расстоянии до 7 морских миль.
Надводных объектов:
– судов валовой вместимостью 5000 т на расстоянии 7 морских миль независимо от ракурса;
– небольшого судна длиной 10 м на расстоянии 3 морских мили;
– объектов, аналогичных навигационному бую, имеющих ЭПР приблизительно 10 кв.м, на расстоянии 2 морских мили.
Поскольку обнаружение целей возможно только при наличии прямой видимости, то, зная высоту установки антенны радара и ориентировочно высоту цели, можно определить предельную дальность обнаружения в километрах, пользуясь известным выражением:
где h1 и h2 – высота установки антенны и высота цели над уровнем моря в метрах.
Обычно в паспортных данных приводят максимальную (инструментальную) дальность, составляющую для большинства компактных яхтенных радаров 16–36 морских миль.
В реальных условиях радиолокационное наблюдение ведется, как правило, на меньших расстояниях, определяемых потребностями судовождения. В этих случаях использование развертки экрана с максимальной дальностью нецелесообразно, т.к., это приводит к существенной перегруженности экрана и к уменьшению размеров цели, что затрудняет ее обнаружение. Поэтому, в радарах существует несколько так называемых шкал дальности – значений, в пределах которых может работать радар. Ниже приведен набор шкал дальности одного портативного радиолокатора:
Дальность (миль)
0,125 0,25 0,5 0,75 1,5 3,0 6,0 12 16
Такое большое количество шкал позволяет получать общее представление об окружающем пространстве на больших расстояниях и получать детальное радиолокационное изображение на дальностях, наиболее важных для обеспечения безопасности плавания. Кроме того, в некоторых радарах имеется возможность выделения и просмотра в укрупненном масштабе отдельных участков окружающего пространства.
Ошибки определения координат цели
Для любого навигационного прибора, определяющего местоположение, важнейшим показателем является ошибка определения местоположения. Судовой радар определяет две координаты цели – дальность относительно антенны и направление (азимут) относительно линии направления (истинного, магнитного, направления движения). Ошибка определения расстояния портативных радаров обычно составляет (0,9–1)% от максимального значения используемой шкалы дальности, ошибка определения направления – ±1°.
Скорость вращения антенны
Этот параметр определяет скорость обновления информации на экране радара и особенно важен при управлении скоростными судами. Скорости вращения антенн портативных радаров достаточно высокие – в зависимости от модели от 24 до 36 об/мин, что позволяет использовать их на всех доступных скоростях передвижения по воде.
Функциональные возможности Функциональные возможности радаров определяют удобство работы с прибором и способность получения той или иной информации. Для понимания того, что может современный радар, вспомним его основные функции.
Обнаружение целей
Обнаружение любых объектов осуществляется визуально на экране локатора. Небольшие объекты – суда, буи, островки – отображаются в виде ярких точек на фоне различных помех – от собственных шумов приемника, отражений от волн и атмосферных осадков, маскирующих отметки от целей. Поэтому, обнаружение целей является процессом выделения их отметок из помех.
Для выделения отметок от целей на фоне помех в судовых радарах предусмотрены различные функции – регулировка усиления приемника, подавление отражений от волн и дождя, расширение отметки (введение т.н. «следа эхо») и ряд других ухищрений, определяющих возможности радара быстро и надежно обнаруживать цели.
Определение координат целей Как уже отмечалось выше, судовой радиолокатор определяет две координаты в своей местной системе – дальность относительно судна и азимут относительно диаметральной плоскости судна или направления на север.
Измерение дальности
Дальность до цели может осуществляться тремя способами – с помощью колец дальности, с помощью курсора и с помощью маркера переменного расстояния VRM.
Если посмотреть на экран радара, первое, что бросается в глаза – это находящиеся на нем концентрические кольца (рис. 72). Количество колец и расстояния между ними жестко связаны с используемыми шкалами дальности. Если, например, используется шкала дальности 16 миль, а на экране 8 колец, то понятно, что интервал между кольцами составляет 2 мили. Для измерения расстояния до цели достаточно подсчитать количество колец между ее отметкой и центром экрана, умножить это число на расстояние между кольцами и прибавить оцененное на глаз приблизительное расстояние отметки от внутренней кромки ближайшего по направлению к центру кольца. Понятно, что такой способ дает наглядную и быструю, но весьма грубую оценку, поэтому для получения точных значений используют два других способа.
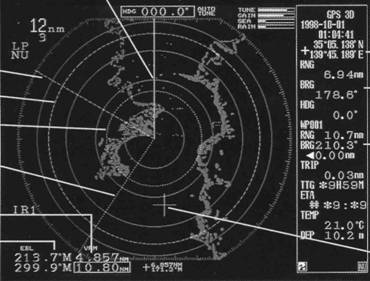
Рис. 72. Измерение дальности на экране радара
Для точных измерений может быть использован курсор и подвижный маркер расстояний VRM. Курсор – это отметка на экране в виде перекрестия, управляемая с помощью клавиш или трэкбола. Чтобы измерить дальность до цели, достаточно поместить перекрестие на внутреннюю кромку отметки, после чего искомое значение дальности вместе со значением азимута высветится в специальном окне в углу экрана.
Маркер расстояний – это кольцо на экране, радиус которого может выбираться оператором. Изменяя величину радиуса, Оператор совмещает кольцо с внутренней границей отметки цели – и вы получите значение расстояния до цели, высвеченное в углу экрана.
Измерение направления
Направление отсчитывается от курсовой линии – вертикальной линии на экране, совпадающей с диаметральной плоскостью судна. При наличии сопряженных с радаром магнитного компаса или гирокомпаса, отсчет азимута может осуществляться от магнитного или истинного направления на Север.
Измерение направления может осуществляться по положению цели на градусной сетке, с помощью курсора (аналогично показанному выше измерению дальности) либо с использованием линии электронного маркера пеленга EBL.
Первый способ дает большие ошибки измерения направления на цель и используется при судовождении для грубой оценки положения судна относительно цели.
Электронный маркер пеленга (EBL) – это исходящая из центра экрана линия (иногда называемая «линия электронного пеленга»), положение которой может управляться оператором. С помощью органов управления наводят маркер на середину отметки, после чего считывают высвеченные в углу экрана значения азимута, либо получают их по шкале направлений, находящейся на краю экрана.
Определение координат
При сопряжении радара с приемником спутниковой навигации или приемоиндикатором радионавигационных систем «Лоран» или «Дека», он может определять и высвечивать на экране широту и долготу выбранных целей.
Масштабирование
В современных радарах имеется возможность выделения отдельных участков и просмотра их в увеличенном масштабе на экране одновременно с наблюдением общего радиолокационного изображения. Для этого курсором выделяют диапазоны детального просмотра по дальности и азимуту и включают режим масштабирования.
Автоматическое сопровождение целей
При расхождении в условиях плохой видимости с одним судном с использованием радара задача решается довольно просто. Однако, в районах с интенсивным судоходством, когда на экране присутствует много отметок от движущихся и неподвижных целей, задача становится трудновыполнимой для судоводителя и светлое время суток.
Для облегчения распознавания целей на экране радиолокатора и маневрирования при большом количестве судов был создан т.н. «атоматический радар-плоттер» (АРП или ARPA), берущий на себя эту задачу. На современных радарах АРП – это небольшая плата, встраиваемая, при необходимости, в его дисплей.
Распознавание целей осуществляется путем анализа изменения их положения за определенное время, точнее, за определенное количество обзоров и привязки их к своим трассам движения. Выделенным целям автоматически присваиваются номера, которые выводят на экран вместе с целями, их траекториями и векторами скорости.
Многооконный режим
Помимо решения основных задач – обнаружения и определения координат целей – современные радиолокаторы обладают набором функций, существенно расширяющих их возможности.
Характерной особенностью современных радаров является многооконный режим работы дисплея. Помимо основного радиолокационного изображения в нижней части экрана располагаются т.н. «Data Boxes»-окна, в которых находится навигационная информация, получаемая от связанных с радаром датчиков – компаса, приемника GPS, эхолота, лага, а также данные о положении на экране курсора и маркеров направления и дальности.
С помощью дополнительных экранных окон можно выделить сектор контроля, положение курсора, а при сопряжении с приемником GPS – характерные для навигатора данные – истинную скорость и направление движения, путевые точки и расстояния до них, получить графическое изображение «Hayway», используемое в приемниках GPS для судовождения по путевым точкам и маршрутам.
Интерфейс
Интерфейс судовых радиолокаторов позволяет использовать их в составе навигационных систем, имеющих единый международный протокол обмена NMEA 0183 или «фирменный» протокол, например, упоминавшийся ранее Sea Talk, что позволяет сопрягать их с различными навигационными приборами и получать от них дополнительную информацию.
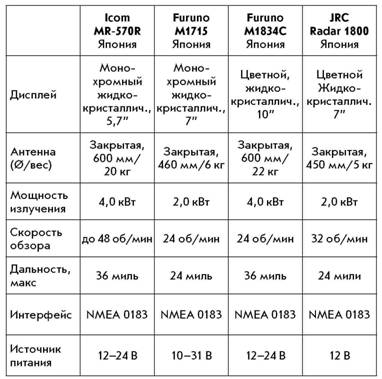
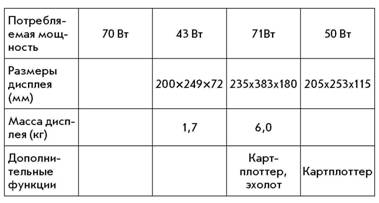
В прилагаемой ниже таблице приведены основные характеристики некоторых наиболее распространенных портативных радиолокаторов.
Более 800 000 книг и аудиокниг! 📚
Получи 2 месяца Литрес Подписки в подарок и наслаждайся неограниченным чтением
ПОЛУЧИТЬ ПОДАРОКЧитайте также
Общие характеристики аппарата
Общие характеристики аппарата • средняя потребляемая мощность 120 Вт;• напряжение питания 12;• средний потребляемый ток 12 А;• выходное напряжение 550 В;• частота импульсов 30 Гц;• источник электроэнергии – один аккумулятор от мотоцикла – емкостью 9 А/ч типа 6МСТ-9;• вес:
Основные технические характеристики ножей
Основные технические характеристики ножей [В виде текста] [В виде таблицы fb2]*) Вместо 154СМ на клинки сейчас идет сталь СРМ S30V. Она несколько тверже по сравнению с 154СМ, более устойчива к коррозии, лучше держит заточку, но точить ее еще труднее.**) Изготовитель не всегда
Основные технические характеристики ножей (в виде текста)
Основные технические характеристики ножей (в виде текста) Benchmade CSKДлина клинка, мм: 154Толщина клинка, мм: 4,5Сталь клинка: D2Твердость закалки, HRC: 59–61Габаритная длина ножа, мм: 278Габаритная длина ножа в ножнах, мм: 372Масса ножа без ножен, г: 270Материал рукояти: KratonМатериал ножен:
Основные технические характеристики ножей (в виде таблицы FB2)
Основные технические характеристики ножей (в виде таблицы FB2) Benchmade CSK SOG Tech Bowie MOD Nightwing Длина клинка, мм 154 163 147 Толщина клинка, мм 4,5 5,5 5 Сталь клинка D2 AUS-8 154CM* Твердость закалки, HRC 59-61 ** - Габаритная длина ножа, мм 278 279 278 Габаритная длина ножа в ножнах, мм 372 300 340 Масса
Технические характеристики ножей.
Технические характеристики ножей. [Увеличить] [В виде текста] [В виде таблицы fb2]* Привожу фабричные данные, после переделки нож стал немного легче, но еще не настолько, как мне бы хотелось.** Мой нож старого образца из первой партии. Теперь клинки изготавливаются из
Потребительские характеристики красок
Потребительские характеристики красок Покрывающая способность краски (в расчете на площадь) определяется поверхностью, которую можно закрыть одним килограммом или одним литром краски с обеспечением требуемой и достаточной толщины слоя на непористой подложке.
Наиболее важные характеристики
Наиболее важные характеристики Парусность и обтекаемость формы. Парусность конструкции определяется площадью боковой, фронтальной поверхности, направленной к ветру. Она меньше аналогичной площади среднего штыревого кружка в 1, 5-2 раза. При большой волне «квадрат»
Характеристики приемников GPS
Характеристики приемников GPS Точность определения координат местаТочность определения координат места является фундаментальным показателем любой навигационной системы, от значения которого будет зависеть, насколько правильно судно будет следовать по проложенному
Технические характеристики керамики
Технические характеристики керамики Одна из самых важных характеристик плитки — износоустойчивость. Согласно европейским нормам существует пять классов керамической плитки (от РЕI–I до РЕI–V). РЕI–I определяет наименее износоустойчивую плитку, РЕI–V — максимально